Contact the Mechanical Engineering Department
Dynamic systems & robotics research
Mechanical Engineering research involvement at NAU
Our research in dynamics and robotics covers a wide variety of topics ranging from UAV systems to advanced prosthesis to new actuators. Details on some of our research projects in dynamics & robotics are described below. Please contact the lead faculty to learn more about any of our research projects.
Project abstracts
Marine energy harvesting for remote sensor systems Accordion Closed

Lead: Micahel Shafer
Keywords: Energy harvesting, wildlife telemetry, marine, solar power
Energy harvesting is used in terrestrial sensor applications, but is largely absent in the marine sensor field despite several possible harvesting methods and calls for use by the ocean science community. This project has focused on working with wildlife telemetry manufactures to identify practical ambient marine energy transduction methods and then developing methods to assess their potential for supplementing telemetry system energy budgets. Despite the inherent benefits of solar power, the inability to quantify energy production capacity in the marine environment has precluded adoption. This project has worked to develop the methods for marine environment solar power energy assessment through both analytic and experimental methods.
UAV Tracking System for Monitoring Wildlife Accordion Closed
![]()
Twisted Polymer Actuators Accordion Closed
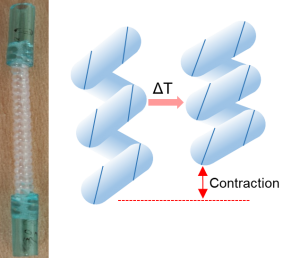
Lead: Heidi Feigenbaum and Michael Shafer
Keywords: biomimetic, artificial muscles, twisted polymer actuators, super coiled
Magnetic shape memory alloys (MSMAs) can undergo a recoverable deformation in the presence of a magnetic field or mechanical load. In this project, our group has developed several thermodynamic based models to predict the magneto-mechanical behavior of MSMAs, the most recent of which is fully three-dimensional. We are also trying to optimize use of MSMAs for various applications, most notably current work focuses on power harvesting with MSMAs.
Human Aware Control of Robots Accordion Closed
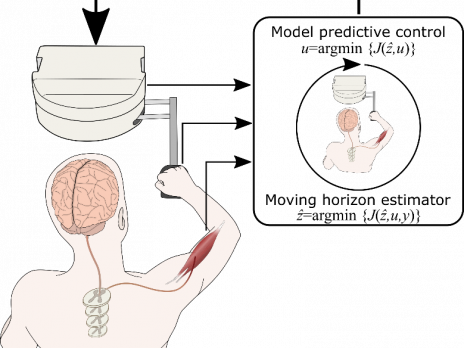
Lead: Reza Sharif Razavian
Keywords: bio-robot, human-robot interaction, biologically inspired control
Current state-of-the-art bio-robots (e.g., assistive exoskeletons or rehabilitation robots) are hard-coded to perform specific actions after detecting the user’s intent. This control paradigm is inherently limiting, as humans inevitably adapt their behavior in response to the interaction with the robot in the short and long timescales. Existing robots are unaware of the ever-changing biological states of the user. Our human-aware controllers encode the knowledge about how humans control and adapt their movements in new environments. Our research aim is to embed these models in robots’ controllers to bring about a paradigm shift in how we build bio-robots—robots that can infer the user’s behavior, capabilities, and limitations, to accordingly respond, adapt, correct, or assist.
Bio-Inspired Adaptive Exoskeleton Control Algorithms Accordion Closed

Lead: Zach Lerner
Keywords: exoskeleton, wearable robotics, control
Exoskeletons hold potential to augment walking ability, yet their use in free-living environments has been limited by the absence of practical and effective control strategies that can appropriately adapt to variable terrain, like stairs. To address this challenge, we are working on an analytical ankle joint moment estimation model using custom wearable sensors and developed an exoskeleton control scheme to adapt assistance proportional to the biological plantar-flexor moment in real-time.
Parallel-elastic Robotic Ankle Exoskeleton Accordion Closed

Lead: Zach Lerner
Keywords: exoskeleton, wearable robotics, actuator design
Actuation design that improves electromechanical efficiency and performance could increase the ability of untethered exoskeletons to provide meaningful assistance in free-living settings. We are working on designing a robotic ankle exoskeleton with a parallel elastic element in the form of a carbon fiber leaf spring to stored and returned energy in parallel to a cable-drive ankle joint during stance phase.
Real-world Exoskeleton Testing and Validation in Free-living Settings Accordion Closed

Lead: Zach Lerner
Keywords: exoskeleton, wearable robotics, biomechanics
The ability to readily complete challenging walking conditions is paramount to increasing and normalizing activities of daily living for ambulatory children and young adults with physical disabilities. Our overarching objective for this project is to augment mobility in challenging free-living settings for individuals with disabilities via ankle exoskeleton assistance. We are testing the use of the technology at home and in community settings.
Hip Exoskeleton Device Development Accordion Closed

Lead: Zach Lerner
Keywords: exoskeleton, wearable robotics, rehabilitation
The purpose of this project is to design and validate a novel autonomous hip exoskeleton with a user-adaptive control strategy capable of reducing the energy cost of level and incline walking in individuals with and without walking impairment.